Second-Order Optimization#
Let’s discuss optimization in the context of second-order gradient descent. The idea here is to use second-order gradient information in combination with first-order information to make more accurate update steps. The basic algorithm is also known as Newton’s method. Examining the difference between first and second-order gradient updates:
is the presence of the \(H(\theta)^{-1}\) term. This is a matrix so important we give it a name, the Hessian, and it is the matrix of all pairwise second-order derivatives of \(L(\theta)\). By scaling our gradients with the inverse Hessian, we get a number of nice properties (which we will examine shortly). The downside of course is the cost; calculating \(H(\theta)\) itself is expensive, and inverting it even more so.
In the rest of this page, we’ll look at:
Interpretations of second-order descent
Approximations to computing \(H(\theta)^{-1}\) in classical optimization
Approximations to computing \(H(\theta)^{-1}\) in deep learning
Second-order descent as preconditioning#
A black-box way to view second-order descent is as a specific type of preconditioning. Recall that a preconditioner is a linear transformation of the gradient, often written as a matrix:
We often want to use preconditioning when we want to update certain parameters at different speeds. For example, a diagonal preconditioner can be used to specify per-parameter learning rates. In classical optimization problems, this can be helpful is we know that e.g. certain inputs have a much higher magnitude, etc. The inverse Hessian ends up being the ‘correct’ way to precondition a gradient update using second-order information, as shown next.
Second-order descent as solving a quadratic approximation#
We can approximate the true loss function using a second-order Taylor series expansion:
Assuming \(\nabla^2 L(\theta)\) is invertible, we can now solve for the \(\theta'\) that minimizes this approximate loss:
which gives us our original second-order descent method. So, the (unscaled) second-order descent iteration is the same as jumping directly to a point that minimizes the quadratic approximation of the loss function. In practice, we often still take a smaller step to account for approximation errors.
Second-order descent as knowing how far to step#
A key property of the Hessian of convex functions is that it is positive definite – in other words, matrix multiplying will never flip the sign of a vector. Even for non-convex functions, we can apply regularization such that the Hessian always remains positive definite. So, second-order descent is sign preserving and will update each parameter in the same direction as first-order descent. The difference is in how much the parameter is updated.
Example: 2D Classical Optimization#
Let’s examine how various second-order methods work on a simple 2D optimization problem. We’ll use a fourth-order polynomial loss function, which is convex but not as simple as a quadratic. As a sanity check, gradient descent can find the minimum within 15 iterations or so:
Show code cell content
def loss_fn(z):
x, y = z
y = y * 2
x = x * 0.8 - 0.5
x_polynomials = jnp.array([x ** (i+1) for i in range(4)])
y_polynomials = jnp.array([y ** (i+1) for i in range(4)])
all_polynomials = jnp.concatenate([x_polynomials, y_polynomials])
multipliers = jax.random.uniform(jax.random.PRNGKey(1), (8,))
multipliers = multipliers.at[3].set(1)
multipliers = multipliers.at[7].set(1)
return jnp.dot(all_polynomials, multipliers) + 0.1 * (x * y)
def plot_optim(optim_fn, opt_state, steps=15):
iter_points = []
z = jnp.array([-0.9, 0.4])
for i in range(steps):
iter_points.append(z)
z, opt_state = optim_fn(z, opt_state, loss_fn)
# Create a grid of points
x = np.linspace(-1, 1, 100)
y = np.linspace(-0.5, 0.5, 100)
X, Y = np.meshgrid(x, y)
XY = np.stack([X.flatten(), Y.flatten()], axis=-1)
Z = jax.vmap(loss_fn)(XY)
Z = Z.reshape(X.shape)
# Create the plot
plt.figure(figsize=(6, 3))
contour = plt.contour(X, Y, Z, levels=30, cmap='viridis', alpha=0.4)
plt.clabel(contour, inline=True, fontsize=8)
iter_points = np.array(iter_points)
plt.plot(iter_points[:, 0], iter_points[:, 1], 'ro-')
plt.xticks([])
plt.yticks([])
plt.show()
@functools.partial(jax.jit, static_argnums=(2,))
def gradient_descent(z, opt_state, loss_fn):
grad_z = jax.grad(loss_fn)(z)
new_z = z - 0.1 * grad_z
opt_state = None
return new_z, opt_state
plot_optim(gradient_descent, None)
Note how learning slows down near the minimum, as the absolute scale of the gradient also approaches zero. Second-order methods provide a way to correct for this.
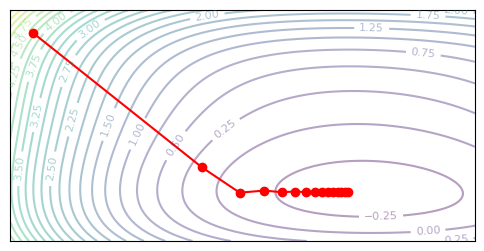
Newton’s Method#
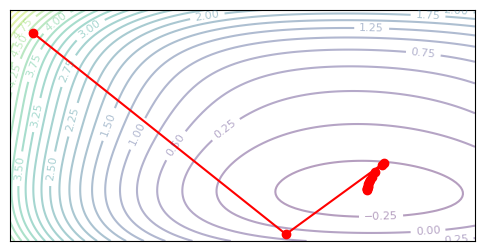
Now, we’ll implement an iterative version of Newton’s method. Remember that Newton’s method is equivalent to finding the solutions to a quadratic approximation of the loss. If the true loss is quadratic, we can solve the problem in a single step. Our loss is not quadratic (it’s a fourth-order polynomial), so we need to use an iterative version of Newton’s method, with a smaller step size.
@functools.partial(jax.jit, static_argnums=(2,))
def newton_descent(z, opt_state, loss_fn):
grad_z = jax.grad(loss_fn)(z)
hessian_z = jax.hessian(loss_fn)(z)
new_z = z - 0.8 * (jnp.linalg.inv(hessian_z) @ grad_z)
opt_state = None
return new_z, opt_state
plot_optim(newton_descent, None)
Cool, we learn pretty fast, but we also end up overshooting the optimal parameters. The danger of Newton’s method is that we can end up taking larger steps than we mean to, since our Hessian is only locally accurate.
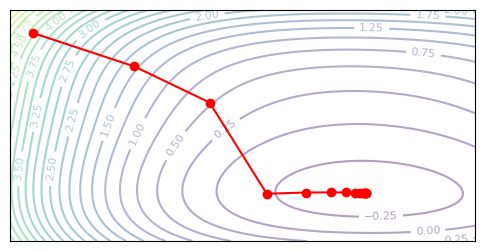
Regularized Newton#
An intuitive way to look at Newton’s method is that by scaling our gradient by the inverse Hessian, we can take larger steps in flatter directions, since those steps should have a smaller overall effect. The problem any errors in the Hessian have the potential to drastically overstep.
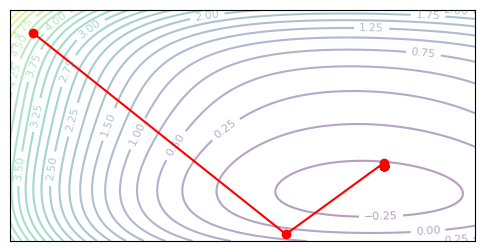
One way to regularize the Newton update is to dampen the update and penalize movement in flatter directions. We can do this by adding an identity matrix to the Hessian. This addition is similar to enforcing a maximum flatness – even if the Hessian estimates a direction as extremely flat, we will treat it as somewhat sloped to prevent excessive updates.
The regular Newton and the dampened Newton behave similarly at high curvature, but at lower curvature, the dampened Newton will behave more conseratively. This lets us safely increase our learning rate.
@functools.partial(jax.jit, static_argnums=(2,))
def damped_newton_descent(z, opt_state, loss_fn):
grad_z = jax.grad(loss_fn)(z)
hessian_z = jax.hessian(loss_fn)(z)
new_z = z - 0.8 * (jnp.linalg.inv(hessian_z + jnp.eye(2) * 1) @ grad_z)
opt_state = None
return new_z, opt_state
plot_optim(damped_newton_descent, None)
Trust Region Newton#
As we saw above, a pain point with Newton methods is that the Hessian is not always well-behaved. If the diagonal values are too small, we can run into numerical issues, and a non-positive-definite Hessian can even cause us to move in a direction that increases loss. A more stable way to use second-order information is to view second-order information as enforcing a trust region over first-order descent. We will minimize first-order loss, subject to a constraint that on the change in parameters.
Note that \(\tilde{L}\) is the first-order approximation of \(L\). As a linear function, the argmin of this approximation lies at infinity, so we need an appropriate constraint to have a viable algorithm. In naive gradient descent, we simply use a small learning rate to approximate a trust region.
Let’s define a better trust region. We know that the Hessian represents second-order behavior of a change in parameters, so we can use the Hessian to define a notion of distance. To make things easier, we can use the absolute value eigenvalue form \(|H|\), which upper bounds the normal \(H\).
In fact, the solution to the constrained problem above is the same as Newton’s method, but we use the absolute value eigenvalue form of H, which is always positive-definite. Intuitively, we use the magnitude of the second-order behavior, but enforce that the sign of the gradient remains the same.
@functools.partial(jax.jit, static_argnums=(2,))
def trust_region_newton(z, opt_state, loss_fn):
grad_z = jax.grad(loss_fn)(z)
hessian_z = jax.hessian(loss_fn)(z)
eigvals, eigvecs = jnp.linalg.eigh(hessian_z)
eigvals = jnp.abs(eigvals)
hessian_psd = jnp.dot(eigvecs, jnp.dot(jnp.diag(eigvals), eigvecs.T)).real
new_z = z - 0.8 * (jnp.linalg.inv(hessian_psd) @ grad_z)
opt_state = None
return new_z, opt_state
plot_optim(trust_region_newton, None)
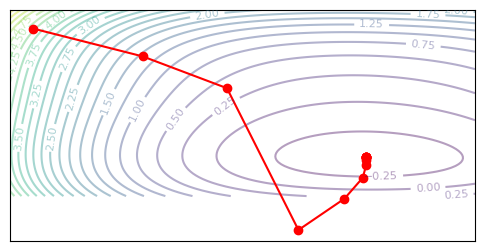
Null result. In our 2D example here, the trust region and Newton method are actually just the same, since \(H\) is always positive-definite along our optimizaztion path. The existence of saddle points scales with dimensionality, and in a 2D example they are rare or nonexistent. In high-dimensional problems, the trust region approach may provide a benefit. An important result is that in the toy case, the trust region approach does not harm learning, thus the absolute-value approximation is reasonable.
BFGS#
Now, we will examine a class of methods known as quasi-Newton methods, which do not construct the exact Hessian but rather an approximation of it. The main idea in BFGS is to use finite difference methods to approximate the Hessian. We’re already taking first-order gradients, and by viewing the resulting affect on the loss of applying these gradients, we can get an estimate of the second-order behavior.
Let’s start with a simple relation. We want to find a matrix \(\tilde{H}\) that approximates the true Hessian \(H\). We know that such a matrix should satisfy the finite-difference relation:
where \(g = \nabla L(\theta)\) represents gradients. The equation states that under any change \(\Delta \theta\), the matrix \(\tilde{H}\) should accurately represent the corresponding change in gradients. The true Hessian satisfies this condition by definition.
Now, we will find a strategy to discover \(\tilde{H}\) in an iterative manner. We want \(\tilde{H}\) to always be symmetric and positive-definite – as we saw in the previous sections, this makes for a well-behaved distance. Let’s go over a simple iteration. When we take a gradient step, we can evaluate the gradient before and after the parameter change, giving us the \(\Delta \theta\) and \(\Delta g\) terms above. So, we should update our estimate \(\tilde{H}\) to solve this new equation. There are many possible \(\tilde{H}\) which solve the system, but we can add a constraint that the change in \(\tilde{H}\) is rank 1.
This gives us the Broyden formula. We want to find \(v\) such that \(\tilde{H} + vv^T\) satisfies the finite-difference relation. Solving it out:
which gives the corresponding rank-1 update to \(\tilde{H}\). The problem this this approach is that we do not have a guarantee that \(\tilde{H}\) remains positive definite.
The BFGS formula gives a rank-2 update that retains positive definiteness:
# @functools.partial(jax.jit, static_argnums=(2,))
def bfgs(z, opt_state, loss_fn):
H = opt_state
grad_z = jax.grad(loss_fn)(z)
# Real BFGS should search for the optimal step size, but we'll just use a fixed one
dz = -0.15 * (jnp.linalg.inv(H) @ grad_z)
new_z = z + dz
grad_newz = jax.grad(loss_fn)(new_z)
dg = grad_newz - grad_z
H_new = H + (jnp.outer(dg, dg) / jnp.dot(dg, dz)) \
- (jnp.outer(jnp.dot(H, dz), jnp.dot(H, dz)) / jnp.dot(dz, jnp.dot(H, dz)))
return new_z, H_new
plot_optim(bfgs, jnp.eye(2))
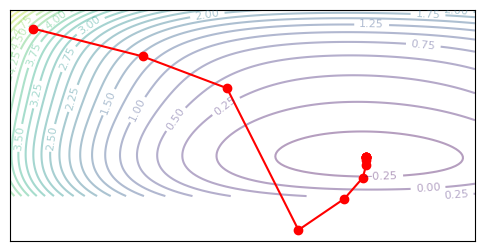
The L-BFGS (Limited-memory BFGS) formula lets us save memory on our Hessian estiamte. In the BFGS algorithm above, we store the entire \(\tilde{H}\) matrix, and invert it at every iteration. Both of these are expensive criteria that we would perfer to remove. Instead, let’s see if we can get away with only storing a low-rank approximation of the inverse Hessian directly.
The idea in L-BFGS is to keep the last \(M\) parameter-gradient pairs in memory, and use them to iteratively update our current gradient to mimic the effect of multiplying by the inverse Hessian. This is commonly achieves using the two-loop recursion approach, which first constructs scalars \(a_i\) and a vector \(q\), then uses them to construct the final update \(H^{-1} g\).
def lbfgs(z, opt_state, loss_fn):
dzs, dgs = opt_state
grad_z = jax.grad(loss_fn)(z)
grad_z_raw = grad_z
# Compute H^-1 grad_z via L-BFGS approximation.
alphas = []
for i in range(len(dzs)):
alpha = jnp.dot(dzs[i], grad_z) / jnp.dot(dzs[i], dgs[i])
grad_z = grad_z - alpha * dgs[i]
alphas.append(alpha)
Hz = grad_z # Starting guess for (H^-1 grad_z) is a constant scale.
for i in reversed(range(len(dzs))):
beta = jnp.dot(dgs[i], Hz) / jnp.dot(dzs[i], dgs[i])
Hz = Hz + (alphas[i] - beta) * dzs[i]
# Real BFGS should search for the optimal step size, but we'll just use a fixed one
dz = -0.15 * Hz
new_z = z + dz
dg = jax.grad(loss_fn)(new_z) - grad_z
dzs = [dz] + dzs
dgs = [dg] + dgs
return new_z, (dzs, dgs)
plot_optim(lbfgs, ([], []), steps=15)
In the precise form, the BFGS and L-BFGS should use a line search to look for the optimal step size. In our implementation I opted to just use a constant step size instead for simplicity. The methods both seem to work after playing with hyperparameters, but numerical issues seem to arise when near the solution. I found that the approximate Hessian often estimates a high curvature, resulting in the second-order update becoming too small near the end – see the L-BFGS trajectory which does not converge to the minimum.
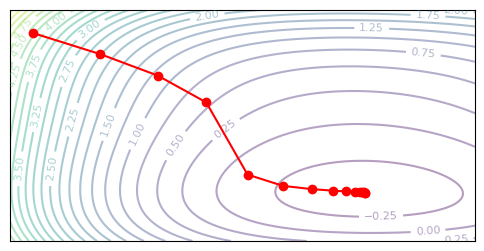
Diagonal Newton#
Another approximation we can try is to only use the diagonal values of the Newton. This is an n-length vector, rather than an n,n matrix. It coresponds exactly to the second-order derivatives of each parameter, without modelling the pairwise interactions. If we know that each parameter has a roughly independent effect on the loss, then a diagonal approximation can be a good idea.
@functools.partial(jax.jit, static_argnums=(2,))
def diagonal_newton_descent(z, opt_state, loss_fn):
grad_z = jax.grad(loss_fn)(z)
def vgrad(f, x): # Second-order gradient (diagonal of Hessian)
y, vjp_fn = jax.vjp(f, x)
return vjp_fn(jnp.ones(y.shape))[0]
grad2_z = vgrad(lambda x: vgrad(loss_fn, x), z)
update = (1 / grad2_z) * grad_z
new_z = z - 0.5 * update
opt_state = None
return new_z, opt_state
plot_optim(diagonal_newton_descent, None)
Example: CIFAR-10 Classification#
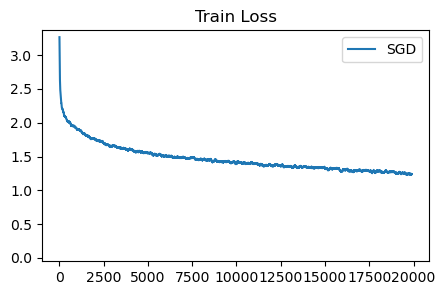
Let’s move on to an example training real neural networks. Continuing from previous pages, we’ll train a small vision transformer to classify CIFAR-10. We will first run a baseline with standard gradient descent.
First-Order SGD
Second-Order (slow)
Gauss-Newton
Natural Gradient
KFAC
Shampoo
Adam as …
Show code cell content
from keras.datasets import cifar10
(train_images, train_labels), (valid_images, valid_labels) = cifar10.load_data()
def get_1d_sincos_pos_embed_from_grid(embed_dim, pos):
assert embed_dim % 2 == 0
omega = jnp.arange(embed_dim // 2, dtype=jnp.float32) / (embed_dim // 2)
omega = 1. / 10000**omega # (D/2,)
pos = pos.reshape(-1) # (M,)
out = jnp.einsum('m,d->md', pos, omega) # (M, D/2), outer product
emb = jnp.concatenate([jnp.sin(out), jnp.cos(out)], axis=1) # (M, D)
return emb
def get_2d_sincos_pos_embed(embed_dim, length):
grid_size = int(length ** 0.5)
assert grid_size * grid_size == length
grid_hw = jnp.arange(grid_size, dtype=jnp.float32)
grid = jnp.stack(jnp.meshgrid(grid_hw, grid_hw), axis=0)
grid = grid.reshape([2, 1, grid_size, grid_size])
emb_h = get_1d_sincos_pos_embed_from_grid(embed_dim // 2, grid[0]) # (H*W, D/2)
emb_w = get_1d_sincos_pos_embed_from_grid(embed_dim // 2, grid[1]) # (H*W, D/2)
pos_embed = jnp.concatenate([emb_h, emb_w], axis=1) # (H*W, D)
return jnp.expand_dims(pos_embed, 0) # (1, H*W, D
class TinyViT(nn.Module):
features: int = 128
patch_size: int = 8
num_classes: int = 10
dropout: float = 0.3
@nn.compact
def __call__(self, x, deterministic=False):
patch_tuple = (self.patch_size, self.patch_size)
num_patches = (x.shape[1] // self.patch_size)
x = nn.Conv(self.features, patch_tuple, patch_tuple, use_bias=True, padding="VALID")(x) # Patch Embed
x = rearrange(x, 'b h w c -> b (h w) c', h=num_patches, w=num_patches)
x = x + get_2d_sincos_pos_embed(self.features, num_patches**2)
x = jnp.concatenate([x, nn.Embed(1, self.features)(jnp.zeros((x.shape[0], 1), dtype=jnp.int32))], axis=1) # Class Token
for _ in range(4):
y = nn.LayerNorm()(x)
y = nn.MultiHeadDotProductAttention(num_heads=4, dropout_rate=self.dropout, deterministic=deterministic)(y, y)
x = x + y
y = nn.LayerNorm()(x)
y = nn.Dense(self.features * 2)(y)
y = nn.gelu(y)
y = nn.Dropout(rate=self.dropout, deterministic=deterministic)(y)
y = nn.Dense(self.features)(y)
y = nn.Dropout(rate=self.dropout, deterministic=deterministic)(y)
x = x + y
x = x[:, 0]
x = nn.Dense(self.num_classes)(x)
return x
def sample_batch(key, batchsize, images, labels):
idx = jax.random.randint(key, (batchsize,), 0, images.shape[0])
return images[idx], labels[idx]
def zero_params(params):
return jax.tree_map(lambda x: jnp.zeros_like(x), params)
def train_cifar(optimizer_fn, init_opt_fn, max_steps, batch_size=128):
train_losses = []
classifier = TinyViT()
key = jax.random.PRNGKey(0)
key, param_key = jax.random.split(key)
v_images, v_labels = sample_batch(param_key, 256, valid_images, valid_labels)
params = classifier.init({'params': param_key, 'dropout': param_key}, v_images)['params']
opt_state = init_opt_fn(params)
@jax.jit
def update_fn(key, params, opt_state, images, labels, step):
def loss_fn(p, x, y):
onehot_labels = jax.nn.one_hot(y[:, 0], 10)
logits = classifier.apply({'params': p}, x/255.0, rngs={'dropout': key}, deterministic=False)
loss = jnp.mean(jnp.sum(-nn.log_softmax(logits) * onehot_labels, axis=-1))
return loss
loss_fn_partial = functools.partial(loss_fn, x=images, y=labels)
logit_fn_partial = lambda p : classifier.apply({'params': p}, images/255.0, rngs={'dropout': key}, deterministic=False)
loss, params, opt_state = optimizer_fn(params, opt_state, loss_fn_partial, labels=labels, step=step, logit_fn=logit_fn_partial, key=key)
return loss, params, opt_state
for i in tqdm.tqdm(range(max_steps)):
key, data_key, update_key = jax.random.split(key, 3)
images, labels = sample_batch(data_key, batch_size, train_images, train_labels)
loss, params, opt_state = update_fn(update_key, params, opt_state, images, labels, i)
train_losses.append(np.array(loss))
return np.array(train_losses)
def plot_losses(losses, labels, title, colors=None, ylim=2):
fig, axs = plt.subplots(1, figsize=(5, 3))
for i, (label, loss) in enumerate(zip(labels, losses)):
loss = np.convolve(loss, np.ones(100), 'valid') / 100
axs.plot(loss, label=label, color=colors[i] if colors else None)
axs.legend()
axs.set_ylim(-0.05, ylim)
axs.set_title(title)
plt.show()
def sgd(params, opt_state, loss_fn, **kwargs):
loss, grads = jax.value_and_grad(loss_fn)(params)
lr = 0.01
new_params = jax.tree_map(lambda p, u: p - lr * u, params, grads)
return loss, new_params, None
init_opt_fn = lambda p : None
sgd_loss = train_cifar(sgd, init_opt_fn, 20_000)
plot_losses([sgd_loss], ['SGD'], 'Train Loss', ylim=None)
100%|██████████| 20000/20000 [00:49<00:00, 405.23it/s]
Diagonal Newton#
Classical Newton’s method cannot be applied to neural networks due to memory requirements. Our small model has around 400k parameters, making the Hessian a matrix of over 160 million parameters. We cannot construct such a matrix, let alone invert it.
An approximation that is easier to handle is the diagonal Newton’s method, which takes the second-order gradients of each individual parameter (ignoring pairwise interactions), then scales the gradient by the inverse. The intution is to increase step-size at areas with low curvature. It is equivalent to setting all entires of the Hessian to zero except those on the diagonal.
Immediately a problem arises – neural networks often have zero curvature. Our network uses ReLU activations, which have a second-order derivative of 0. This means that for a large portion of parameters, the diagonal Hessian may contain zeros, and dividing by zero scales up our update to infinity. We can bandage this problem by clipping the diagonal Hessian to remain positive.
def diagonal_newton_sgd(params, opt_state, loss_fn, **kwargs):
def vgrad(f, x): # Second-order gradient (diagonal of Hessian)
y, vjp_fn = jax.vjp(f, x)
return vjp_fn(jax.tree_map(lambda p: jnp.ones_like(p), y))[0]
loss, grads = jax.value_and_grad(loss_fn)(params)
grad2 = vgrad(lambda x: vgrad(loss_fn, x), params)
grad2 = jax.tree_map(lambda x: jnp.clip(x, 0.5, 3), grad2) # Clip to reasonable values
updates = jax.tree_map(lambda g, h: g / h, grads, grad2)
updates = jax.tree_map(lambda x: jnp.clip(x, -0.5, 0.5), updates) # Clip to reasonable values
lr = 0.01
new_params = jax.tree_map(lambda p, u: p - lr * u, params, updates)
return loss, new_params, None
init_opt_fn = lambda p : None
diagonal_newton_loss = train_cifar(diagonal_newton_sgd, init_opt_fn, 20_000)
print(diagonal_newton_loss[:10])
plot_losses([sgd_loss, diagonal_newton_loss], ['SGD Loss', 'Diagonal Newton'], 'Train Loss', ylim=None)
100%|██████████| 20000/20000 [02:09<00:00, 154.61it/s]
[5.3107767 5.0005608 5.6169114 6.0569983 6.50208 7.410034 5.540567
5.760478 4.5348625 4.385929 ]
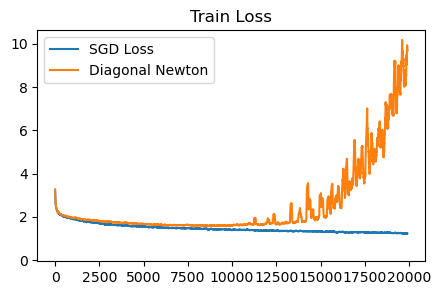
This diagonal Newton method is not very good. It requires careful clipping of the Hessian and the updates, otherwise the training runs diverge.
AdaHessian#
Second-order methods are sensitive to noise. When we do stochastic gradient descent, there is inherent noise in the batch we sample. For first-order methods the noise is not really a problem, but in second-order methods, the noise can lead to inaccurate Hessian estimation and catastrophic steps. AdaHessian proposes a momentum-based technique, namely, a running average of the diagonal Hessian is used.
def adahessian(params, opt_state, loss_fn, step, **kwargs):
grad2_momentum = opt_state
def vgrad(f, x): # Second-order gradient (diagonal of Hessian)
y, vjp_fn = jax.vjp(f, x)
return vjp_fn(jax.tree_map(lambda p: jnp.ones_like(p), y))[0]
loss, grads = jax.value_and_grad(loss_fn)(params)
grad2 = vgrad(lambda x: vgrad(loss_fn, x), params)
b2 = 0.999
grad2_momentum = jax.tree_map(lambda v, g: b2 * v + (1-b2) * g**2, grad2_momentum, grad2)
grad2_hat = jax.tree_map(lambda v: v / (1 - b2 ** (step + 1)), grad2_momentum)
updates = jax.tree_map(lambda g, h: g / (jnp.sqrt(h) + 1e-6), grads, grad2_hat)
lr = 0.015
new_params = jax.tree_map(lambda p, u: p - lr * u, params, updates)
return loss, new_params, grad2_momentum
init_opt_fn = lambda p : zero_params(p)
adahessian_loss = train_cifar(adahessian, init_opt_fn, 20_000)
plot_losses([sgd_loss, diagonal_newton_loss, adahessian_loss], ['SGD Loss', 'Diagonal Newton', 'AdaHessian'], 'Train Loss', ylim=None)
100%|██████████| 20000/20000 [02:03<00:00, 161.62it/s]
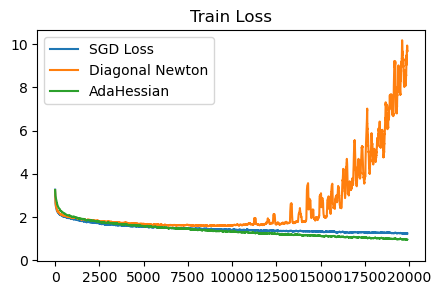
AdaHessian is much better than diagonal Newton. Using momentum to smooth out the diagonal Hessian estimation seems to be key. Without it, at some point in training the updates will diverge. We are also able to remove the manual clipping on the Hessian without any issues.
Generalized Gauss-Newton#
The Generalized Gauss-Newton method gives us another way of approximating the Hessian, this time as a sum of outer products. Let us break up our full function into two components: the network \(N\) and the loss \(L\), which we can write as \(L(N(\theta))\). The full Hessian decomposes into two terms:
where \(J\) represents the Jacobian matrix of first-order derivatives.
The Gauss-Newton approximation drops the second term, keeping only the first. Note how the second term contains \(H_{Ni}\), which is the Hessian of the neural network – by omitting this term, the Gauss-Newton approximation becomes significantly easier to calculate. The first term contains only the first-order Jacobians, along with the Hessian of the loss function, which is simple and known in analytical form. The Hessian of softmax cross-entropy loss is \(diag(z) - zz^T\), where \(z\) is the vector of logits. The first term is also guaranteed to be positive semi-definite.
To efficiently locate descent under Gauss-Newton, we opt to construct a low-rank approximation to the matrix. The Gauss-Newton matrix \(G\) calculated over a batch of size \(b\) has a rank of at most \(b\), so we can locate the solution of \(G^{-1} \nabla_\theta\) in an efficient way. The decomposition is at follows:
import jax.flatten_util
def gauss_newton(params, opt_state, loss_fn, logit_fn, labels, **kwargs):
flat_params, unravel_fn = jax.flatten_util.ravel_pytree(params)
logit_fn_flat = lambda p: logit_fn(unravel_fn(p))
# Jacobian of logits, cross-entropy residuals, and loss.
logits = logit_fn(params)
probs = jax.nn.softmax(logits) # (B, C)
onehot_labels = jax.nn.one_hot(labels[:, 0], 10)
residuals = jnp.reshape(probs - onehot_labels, (-1,))
loss = jnp.mean(jnp.sum(-jnp.log(probs) * onehot_labels, axis=-1))
# Construct low-rank Gauss-Newton approximation.
J = jax.jacobian(logit_fn_flat)(flat_params)
J = jnp.reshape(J, (J.shape[0] * J.shape[1], -1))
flat_probs = jnp.reshape(probs, (-1,))
H_l = jnp.diag(flat_probs) - jnp.outer(flat_probs, flat_probs)
G = H_l @ J @ J.T
G = G + jnp.eye(J.shape[0]) * 0.8 # Damping
# Solve for update direction.
updates_flat = J.T @ jnp.linalg.solve(G, residuals)
updates = unravel_fn(updates_flat)
lr = 0.01
new_params = jax.tree_map(lambda p, u: p - lr * u, params, updates)
# jax.debug.print('loss {x}', x=loss)
return loss, new_params, None
init_opt_fn = lambda p : None
gauss_newton_loss = train_cifar(gauss_newton, init_opt_fn, 20_000, batch_size=32)
print(gauss_newton_loss)
plot_losses([sgd_loss, gauss_newton_loss], ['SGD Loss', 'Gauss-Newton'], 'Train Loss', ylim=None)
100%|██████████| 20000/20000 [17:35<00:00, 18.95it/s]
[5.3678956 4.4173384 4.3356314 ... 2.0501223 2.140688 1.8370565]
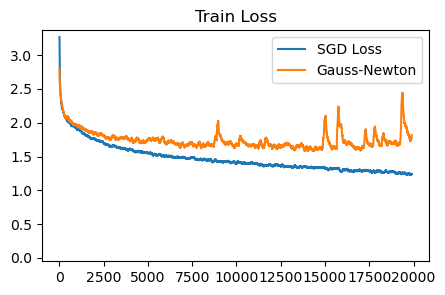
Unfortunately, the results don’t seem great (even with a decent attempt at tuning). They are better than the diagonal Newton. Perhaps, similar to AdaHessian, a running average of the Gauss-Newton is required? However due to the specific low-rank form we use, it is tricky to maintain this average.
Natural Gradient#
The natural gradient is a way to precondition our gradient updates by taking the steepest directions under a KL divergence metric. Notably, descent under this metric is invariant to parametermization – the same update should be achieved no matter how the internal architecture of the network. We can do this by preconditioning using the Fisher information matrix, a second-order approximation of KL divergence: $\( D_{KL}(p_\theta(y) || p_\theta(y) \approx F = E_{y \sim p_\theta(y)} \left[ (\nabla_\theta \log p_\theta (y)) (\nabla_\theta \log p_\theta(y))^T \right] \\ \theta' \leftarrow \theta + F^{-1} \nabla \theta \)$
where \(y\) denotes the output of the neural network. Generally in machine learning this term is computed in an expectation over inputs \(x\) as well, setting \(p_\theta(y) \rightarrow p_\theta(y|x)\).
As it turns out, the natural gradient form for MSE and cross-entropy loss functions are equivalent to the generalzed Gauss-Newton form we described above. A simple natural gradient algorithm is to take the expectation \(E_{y \sim p}\) is taken over the minibatch, and the inner form becomes \(J_N^T F_L J_N\). For cross-entropy, \(H_L = F_L = \text(diag(z)) - zz^T\), same as above. So we have no experiment to run here.
Kronecker-Factored Apprixmation (K-FAC)#
K-FAC is another approach for estimating the natural gradient. In the above implementation, we efficiently inverted the Fisher by using its low-rank form per batch. K-FAC does not assume this low rank structure, so it’s helpful in cases where we have large batch sizes, or more commonly, when we want to estimate the Fisher using a series of past updates, which greatly increases the estimation accuracy. K-FAC divides the inverse Fisher into blocks, where each block contains all parameters for a single layer.
The Fisher matrix has a blockwise representation in terms of individual layer parameters. Noting each layer’s parameters as a vector \(W_n\),
thus \(F\) is an (n,n) block matrix with each block containing \(E[(\nabla W_i)(\nabla W_j)^T]\). We can further decompose these blocks into a Kronecker product between gradients and activations, noting that \(\nabla W_n = g_n a_{n-1}^T = a_{n-1} \otimes g_n\).
The major approximation to make is to factorize the expectation into the individual outer products:
which can be seen as assuming that all \(a_i a_j^T\) and \(g_i g_j^T\) products are independent. This assumption is clearly not true, but in the paper they find it to be reasonable.
The next approximation is only take the block-tridiagonal components of \(F\). The intuition is that second-order relations are much more likely to exist between layers that connect with each other. By making this approximation, each tridiagonal block can be inverted independently, saving much computational time.
Finally, K-FAC introduces a number of auxilliary tricks to help optimization.
An exponential average of \(a_i a_j^T\) and \(g_i g_j^T\) are used when computing \(F\). As we saw earlier with AdaHessian, this kind of cumulative second-order statistics appears neccessary for stochastic optimization. Exponential averaging cannot be done with the low-rank style update in the GGN section, because the average matrix would lose its low-rank form.
Damping of F is applied. We used damping in earlier methods, equivalent to adding a constant diagonal term to the preconditioner. This can be seen as interpolating between pure second-order descent and first-order descent. In our experiments, we used a constant damping, but the correct damping coefficient actually changes significantly during training. K-FAC uses a dynamic heuristic – if the second-order approximation (as predicted by \(F^{-1}\) and \(\nabla_\theta\)) closely matches what actually happens after applying the update, we reduce damping by a multiplicative factor, otherwise we increase by that factor.
Dynamic learning rate. It is expensive to invert the true \(F\), which is why we use an approximation. But we can utilize the true \(F\) in a cheaper way by calculating how large a step to take with the approximate update vector. The per-step learning rate is dynamically calculated using the true \(F\) to find a sweet spot, which is possible as \(F\) represents a quadratic approximation, so we can scale the LR to bring us close to the solution of that quadratic.
Momentum of final gradient updates is also used.
Unfortunately the full K-FAC is quite complicated, so we won’t replicate it here in code.
Adagrad and Adam#
In our page on optimization methods we covered Adagrad and Adam, which rescale the gradient by an average of past gradient variances. There is an interpretation of this rescaling as approximating the natural gradient. Taking a diagonal approximation of the Fisher:
This interpretation shows that Adam assumes our loss function is a log-likelihood. Common loss functions (MSE, cross-entropy) already satisfy this. However, MSE is equivalent to parameterizing the mean of a Gaussian with *unit variance*. If we additionally predict the variance of the distribution, we may potentially get a more accurate log-likelihood (and thus, a better natural gradient).
we obtain a diagonal matrix consisting of un-normalized gradient variances, which is precisely what we normalize by in Adam.
Aam divides by the square root of gradient variances, which in our notation means dividing by \(F^{1/2}\) rather than \(F\). This can be seen as a regularization choice appropriate when objectives are not strongly convex. Adam also traditionally adds a constant epsilon to the \(g^2\) term – from a natural gradient perspective, the epsilon is not only for numerical stability, but also acts like a damping regularizer.
(https://www.arxiv.org/pdf/2405.12807)
def adam_no_momentum(params, opt_state, loss_fn, step, exponent, **kwargs):
loss, grads = jax.value_and_grad(loss_fn)(params)
variance = opt_state
b2 = 0.999
new_variance = jax.tree_map(lambda v, g: b2 * v + (1-b2) * g ** 2, variance, grads)
v_hat = jax.tree_map(lambda v: v / (1 - b2 ** (step + 1)), new_variance)
update = jax.tree_map(lambda g, v: g / (jnp.power(v, exponent) + 1e-6), grads, v_hat)
new_params = jax.tree_map(lambda p, u: p - 0.001 * u, params, update)
return loss, new_params, new_variance
init_opt_fn = lambda m: zero_params(m)
adam_sqrt_loss = train_cifar(functools.partial(adam_no_momentum, exponent=0.5), init_opt_fn, 20_000)
adam_naturalgrad_loss = train_cifar(functools.partial(adam_no_momentum, exponent=1), init_opt_fn, 20_000)
plot_losses([sgd_loss, adam_sqrt_loss, adam_naturalgrad_loss], ['SGD Loss', 'Adam', 'Adam (No sqrt)'], 'Train Loss')
plot_losses([sgd_loss, adam_sqrt_loss, adam_naturalgrad_loss], ['SGD Loss', 'Adam', 'Adam (No sqrt)'], 'Train Loss', ylim=1000)
0%| | 0/20000 [00:00<?, ?it/s]
100%|██████████| 20000/20000 [00:53<00:00, 373.61it/s]
100%|██████████| 20000/20000 [00:50<00:00, 397.39it/s]
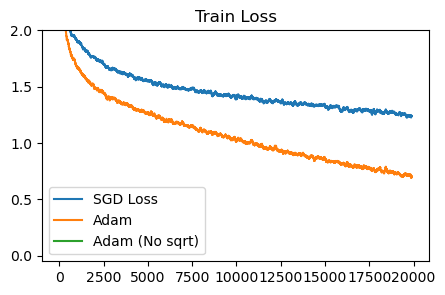
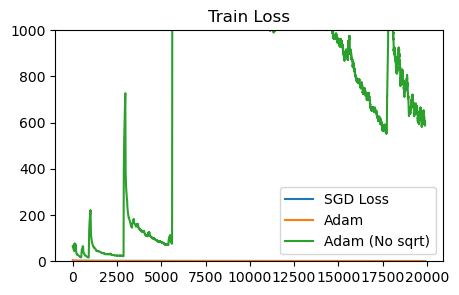
Without the sqrt term, Adam diverges. Likely, we can make the non-sqrt, natural-gradient style of Adam update more stable by increasing the damping constant or having a dynamic damping.
Fisher vs. Empirical Fisher#
A distinction must be made between the empirical Fisher and the proper Fisher. The difference is in the expectation over which the gradients are calculated. View the differences:
The proper Fisher is an expectation taken over the model’s outputs, whereas the empirical Fisher uses an expectation over labels from the data. In our algorithms above, the GGN and K-FAC algorithms use the proper Fisher, while Adam uses the empirical Fisher. Most of the theoretical knowledge about natural gradient descent utilizes the proper Fisher, however, the empirical Fisher can sometimes perform similarly in practice.
The important criteria is that the empirical Fisher can point in distorted directions when the model is far from convergence.
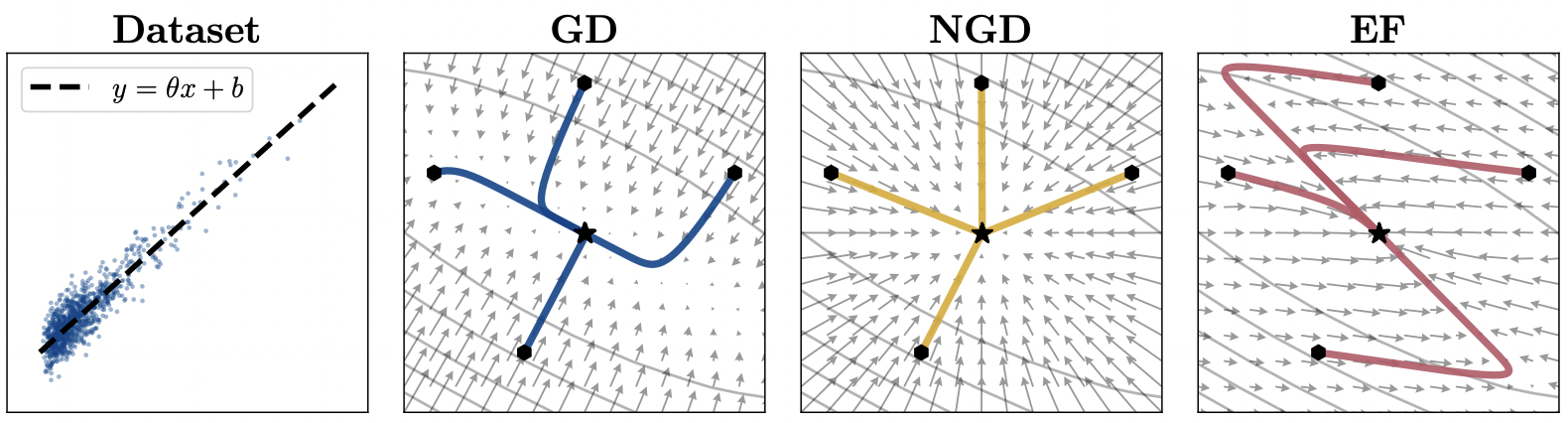
Proper Fisher (NGD) vs. Empirical Fisher (EF). Source: Kunster et al. 2020 (https://arxiv.org/pdf/1905.12558)
Computationally, we can compute the proper Fisher using a second backwards pass, substituting the true labels with in-distribution labels generated by the current network.
def adam_proper_fisher(params, opt_state, loss_fn, step, exponent, logit_fn, key, **kwargs):
key = jax.random.fold_in(key, step)
def proper_fisher(params):
logits = logit_fn(params)
sampled_targets = jax.random.categorical(key, logits, 1)
onehot_targets = jax.nn.one_hot(sampled_targets, 10)
probs = jax.nn.softmax(logits)
loss = -jnp.mean(jnp.sum(jnp.log(probs) * onehot_targets, axis=-1))
return loss
fisher_grads = jax.grad(proper_fisher)(params)
loss, grads = jax.value_and_grad(loss_fn)(params)
variance = opt_state
b2 = 0.999
new_variance = jax.tree_map(lambda v, g: b2 * v + (1-b2) * g ** 2, variance, fisher_grads)
v_hat = jax.tree_map(lambda v: v / (1 - b2 ** (step + 1)), new_variance)
update = jax.tree_map(lambda g, v: g / (jnp.power(v, exponent) + 1e-2), grads, v_hat)
new_params = jax.tree_map(lambda p, u: p - 0.0001 * u, params, update)
return loss, new_params, new_variance
init_opt_fn = lambda m: zero_params(m)
adam_proper_sqrt_loss = train_cifar(functools.partial(adam_proper_fisher, exponent=0.5), init_opt_fn, 20_000)
plot_losses([sgd_loss, adam_sqrt_loss, adam_proper_sqrt_loss], ['SGD Loss', 'Adam', 'Adam (Proper Fisher)'], 'Train Loss')
100%|██████████| 20000/20000 [01:27<00:00, 228.16it/s]
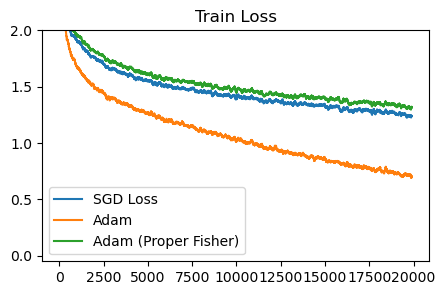
Adam with the proper Fisher diverges unless we decrease the learning rate by 10x, and afterwards behaves similar to SGD.
Shampoo#
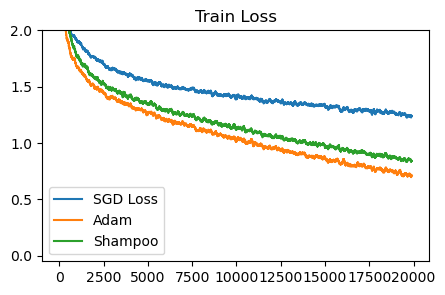
Adagrad and Adam use a diagonal approximation of the (empirical Fisher) natural gradient. We can get a richer preconditioner by using a low-rank, blockwise approximation of the Fisher instead. Shampoo approximates the Fisher by maintaining a set of two matrices \(L\) and \(R\) for each dense layer, which combine to form a low-rank approximation of the full Fisher.
For every matrix parameter, calculate gradient \(G\), then run: $\( L \leftarrow \beta L + (1-\beta) GG^T \\ R \leftarrow \beta R + (1-\beta) G^T G \\ \theta \leftarrow \theta + \alpha L^{-1/2} G R^{-1/2} \\ \)$
and for vector parameters, we can simply run regular Adam/Adagrad, maintaining a vector of gradient variances.
Show code cell content
_INVERSE_PTH_ROOT_FAILURE_THRESHOLD = 0.1
_INVERSE_PTH_ROOT_PRECISION = jax.lax.Precision.HIGHEST
_INVERSE_PTH_ROOT_DATA_TYPE = jnp.float32
def power_iter(mat_g, error_tolerance=1e-6, num_iters=100):
"""Power iteration.
Args:
mat_g: the symmetric PSD matrix.
error_tolerance: Iterative exit condition.
num_iters: Number of iterations.
Returns:
eigen vector, eigen value, num_iters
"""
mat_g_size = mat_g.shape[-1]
def _iter_condition(state):
i, unused_v, unused_s, unused_s_v, run_step = state
return jnp.logical_and(i < num_iters, run_step)
def _iter_body(state):
"""One step of power iteration."""
i, new_v, s, s_v, unused_run_step = state
new_v = new_v / jnp.linalg.norm(new_v)
s_v = jnp.einsum(
'ij,j->i', mat_g, new_v, precision=_INVERSE_PTH_ROOT_PRECISION)
s_new = jnp.einsum(
'i,i->', new_v, s_v, precision=_INVERSE_PTH_ROOT_PRECISION)
return (i + 1, s_v, s_new, s_v,
jnp.greater(jnp.abs(s_new - s), error_tolerance))
# Figure out how to use step as seed for random.
v_0 = np.random.uniform(-1.0, 1.0, mat_g_size).astype(mat_g.dtype)
init_state = tuple([0, v_0, jnp.zeros([], dtype=mat_g.dtype), v_0, True])
num_iters, v_out, s_out, _, _ = jax.lax.while_loop(
_iter_condition, _iter_body, init_state)
v_out = v_out / jnp.linalg.norm(v_out)
return v_out, s_out, num_iters
def matrix_inverse_pth_root(mat_g,
p,
iter_count=100,
error_tolerance=1e-6,
ridge_epsilon=1e-6):
"""Computes mat_g^(-1/p), where p is a positive integer.
Coupled newton iterations for matrix inverse pth root.
Args:
mat_g: the symmetric PSD matrix whose power it to be computed
p: exponent, for p a positive integer.
iter_count: Maximum number of iterations.
error_tolerance: Error indicator, useful for early termination.
ridge_epsilon: Ridge epsilon added to make the matrix positive definite.
Returns:
mat_g^(-1/p)
"""
mat_g_size = mat_g.shape[0]
alpha = jnp.asarray(-1.0 / p, _INVERSE_PTH_ROOT_DATA_TYPE)
identity = jnp.eye(mat_g_size, dtype=_INVERSE_PTH_ROOT_DATA_TYPE)
_, max_ev, _ = power_iter(mat_g)
ridge_epsilon = ridge_epsilon * jnp.maximum(max_ev, 1e-16)
def _unrolled_mat_pow_1(mat_m):
"""Computes mat_m^1."""
return mat_m
def _unrolled_mat_pow_2(mat_m):
"""Computes mat_m^2."""
return jnp.matmul(mat_m, mat_m, precision=_INVERSE_PTH_ROOT_PRECISION)
def _unrolled_mat_pow_4(mat_m):
"""Computes mat_m^4."""
mat_pow_2 = _unrolled_mat_pow_2(mat_m)
return jnp.matmul(
mat_pow_2, mat_pow_2, precision=_INVERSE_PTH_ROOT_PRECISION)
def _unrolled_mat_pow_8(mat_m):
"""Computes mat_m^4."""
mat_pow_4 = _unrolled_mat_pow_4(mat_m)
return jnp.matmul(
mat_pow_4, mat_pow_4, precision=_INVERSE_PTH_ROOT_PRECISION)
def mat_power(mat_m, p):
"""Computes mat_m^p, for p == 1, 2, 4 or 8.
Args:
mat_m: a square matrix
p: a positive integer
Returns:
mat_m^p
"""
# We unrolled the loop for performance reasons.
exponent = jnp.round(jnp.log2(p))
return jax.lax.switch(
jnp.asarray(exponent, jnp.int32), [
_unrolled_mat_pow_1,
_unrolled_mat_pow_2,
_unrolled_mat_pow_4,
_unrolled_mat_pow_8,
], (mat_m))
def _iter_condition(state):
(i, unused_mat_m, unused_mat_h, unused_old_mat_h, error,
run_step) = state
error_above_threshold = jnp.logical_and(
error > error_tolerance, run_step)
return jnp.logical_and(i < iter_count, error_above_threshold)
def _iter_body(state):
(i, mat_m, mat_h, unused_old_mat_h, error, unused_run_step) = state
mat_m_i = (1 - alpha) * identity + alpha * mat_m
new_mat_m = jnp.matmul(
mat_power(mat_m_i, p), mat_m, precision=_INVERSE_PTH_ROOT_PRECISION)
new_mat_h = jnp.matmul(
mat_h, mat_m_i, precision=_INVERSE_PTH_ROOT_PRECISION)
new_error = jnp.max(jnp.abs(new_mat_m - identity))
# sometimes error increases after an iteration before decreasing and
# converging. 1.2 factor is used to bound the maximal allowed increase.
return (i + 1, new_mat_m, new_mat_h, mat_h, new_error,
new_error < error * 1.2)
if mat_g_size == 1:
resultant_mat_h = (mat_g + ridge_epsilon)**alpha
error = 0
else:
damped_mat_g = mat_g + ridge_epsilon * identity
z = (1 + p) / (2 * jnp.linalg.norm(damped_mat_g))
new_mat_m_0 = damped_mat_g * z
new_error = jnp.max(jnp.abs(new_mat_m_0 - identity))
new_mat_h_0 = identity * jnp.power(z, 1.0 / p)
init_state = tuple(
[0, new_mat_m_0, new_mat_h_0, new_mat_h_0, new_error, True])
_, mat_m, mat_h, old_mat_h, error, convergence = jax.lax.while_loop(
_iter_condition, _iter_body, init_state)
error = jnp.max(jnp.abs(mat_m - identity))
is_converged = jnp.asarray(convergence, old_mat_h.dtype)
resultant_mat_h = is_converged * mat_h + (1 - is_converged) * old_mat_h
resultant_mat_h = jnp.asarray(resultant_mat_h, mat_g.dtype)
return resultant_mat_h
def shampoo_adamlike(params, opt_state, loss_fn, step, exponent, **kwargs):
loss, grads = jax.value_and_grad(loss_fn)(params)
variance = opt_state
b2 = 0.999
def update_variances(g, v):
if len(g.shape) == 2:
vl, vr = v
l = g @ g.T
r = g.T @ g
vl = b2 * vl + (1-b2) * l
vr = b2 * vr + (1-b2) * r
return vl, vr
else:
return b2 * v + (1-b2) * g ** 2
new_variance = jax.tree_map(update_variances, grads, variance)
v_hat = jax.tree_map(lambda v: v / (1 - b2 ** (step + 1)), new_variance)
def update_fisher(g, v):
if len(g.shape) == 2:
vl, vr = v
return matrix_inverse_pth_root(vl, 4) @ g @ matrix_inverse_pth_root(vr, 4)
else:
return g / (jnp.power(v, exponent) + 1e-6)
update = jax.tree_map(update_fisher, grads, v_hat)
new_params = jax.tree_map(lambda p, u: p - 0.002 * u, params, update)
return loss, new_params, new_variance
def zero_fn(x):
if isinstance(x, jnp.ndarray) and len(x.shape) == 2:
return jnp.zeros((x.shape[0], x.shape[0])), jnp.zeros((x.shape[1], x.shape[1]))
else:
return jnp.zeros_like(x)
def zero_params_shampoo(params):
opt_state = jax.tree_map(lambda x: zero_fn(x), params)
return opt_state
init_opt_fn = lambda m: zero_params_shampoo(m)
shampoo_loss = train_cifar(functools.partial(shampoo_adamlike, exponent=0.5), init_opt_fn, 20_000)
# print(shampoo_loss)
plot_losses([sgd_loss, adam_sqrt_loss, shampoo_loss], ['SGD Loss', 'Adam', 'Shampoo'], 'Train Loss')
100%|██████████| 20000/20000 [09:28<00:00, 35.20it/s]
References#
https://www.deeplearningbook.org/contents/optimization.html
http://www.athenasc.com/nonlinbook.html
https://arxiv.org/abs/1706.03662 (on the second-order behavior of relu networks)
https://arxiv.org/abs/1905.12558 (empirical fisher vs fisher)
https://arxiv.org/abs/2405.14402 (low-rank GGN training)