Optimization#
Within the umbrella of gradient descent, there are many varieties of strategies we can choose from. We usually refer these update choices as optimizers, which often take the form of modifying the gradient in some way to stabilize learning.
Gradient Descent#
The simplest optimization strategy is just gradient descent. The idea is to iteratively query the gradient, then update the parameters to move slightly in that direction. Remember that we want to minimize loss, so we want to move in the negative direction of the gradient.
Gradients represent the first-order behavior of the function, so gradients are only accurate around a local neighborhood of the parameters. A nice analogy is to think about descending down a parabola by moving in its tangent line. The tangent is constantly changing, so we need to keep re-calculating our gradient as we update the parameters.
# Gradient Descent
grads = grad(params, x, y)
params = params - grads
Note that the larger of a step we take, the more inaccurate our gradient direction is. To accomodate for this, we will use a small learning rate and scale down our gradient accordingly.
# Gradient Descent with learning rate.
grads = grad(params, x, y)
params = params - grads * lr
Example: Quadratic loss function#
To understand some dynamics about gradient descent, let’s take a look at a simple example. We’ll look at a simple quadratic loss function, a classic example in optimization. We are given a loss function paramterized by \(Q\) such that \(L(x) = x^TQx\), and we look to find \(x\) that minimizes the loss. We’ll use a \((2,2)\) matrix \(Q\), so \(x\) is a 2-dimensional vector.
Let’s examine some simple runs of gradient descent. The key here is to demonstrate that even for very simple functions, choosing the correct learning rate is important. Remember that our learning rate is intuitively defines a local neighborhood over parameters where we assume our gradient is correct.
Show code cell content
def plot_optim(optim):
theta = np.pi / 16
eigenvalues = np.array([1, 6])
Q = np.array([[np.cos(theta), -np.sin(theta)], [np.sin(theta), np.cos(theta)]]) @ np.diag(eigenvalues) @ np.array([[np.cos(theta), np.sin(theta)], [-np.sin(theta), np.cos(theta)]])
@jax.vmap
def quadratic_loss(v):
return v.T @ Q @ v
iter_points = []
z = np.array([9.5, -1])
for i in range(50):
iter_points.append(z)
grad_z = Q @ z
z = optim(z, grad_z)
# Create a grid of points
x = np.linspace(-10, 10, 100)
y = np.linspace(-4, 4, 100)
X, Y = np.meshgrid(x, y)
XY = np.stack([X.flatten(), Y.flatten()], axis=-1)
Z = quadratic_loss(XY)
Z = Z.reshape(X.shape)
# Create the plot
plt.figure(figsize=(10, 4))
contour = plt.contour(X, Y, Z, levels=50, cmap='viridis', alpha=0.4)
plt.clabel(contour, inline=True, fontsize=8)
iter_points = np.array(iter_points)
plt.plot(iter_points[:, 0], iter_points[:, 1], 'ro-')
plt.xticks([])
plt.yticks([])
plt.show()
def gradient_descent(z, grad_z):
return z - 0.1 * grad_z
plot_optim(gradient_descent)
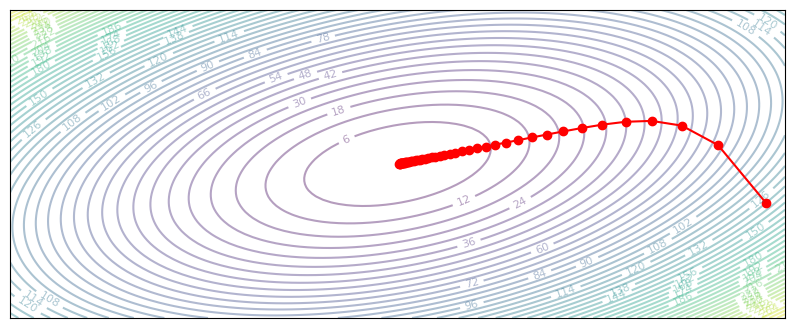
Through iterative gradient descent, we are able to reach the optimum in the center. What happens as we change the learning rate?
def gradient_descent_slow(z, grad_z):
return z - 0.02 * grad_z
plot_optim(gradient_descent_slow)
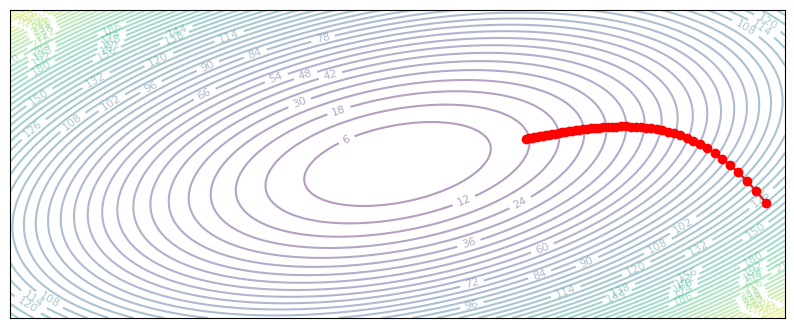
If our learning rate is too low, the network will take a long time to reach the minimum point. Slow convergence is especially true for quadratic loss functions (mean-squared-error in deep learning), as the gradient magnitude approaches zero along with the loss.
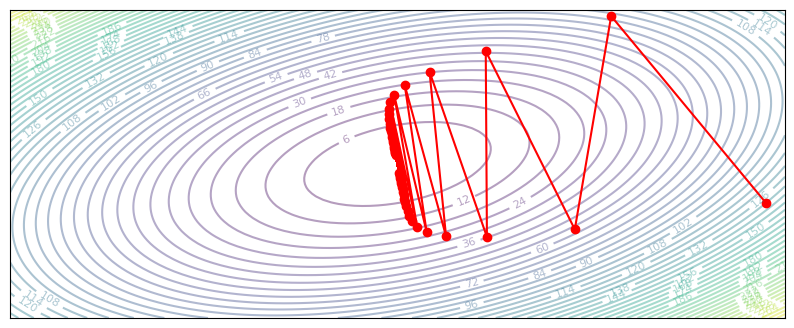
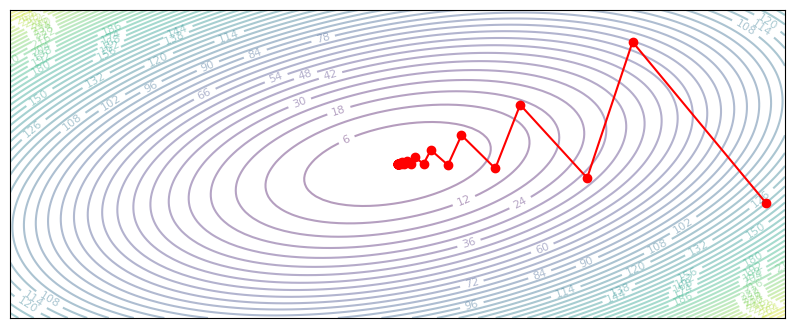
On the other hand, as we increase the learning rate:
def gradient_descent_oscillate(z, grad_z):
return z - 0.325 * grad_z
plot_optim(gradient_descent_oscillate)
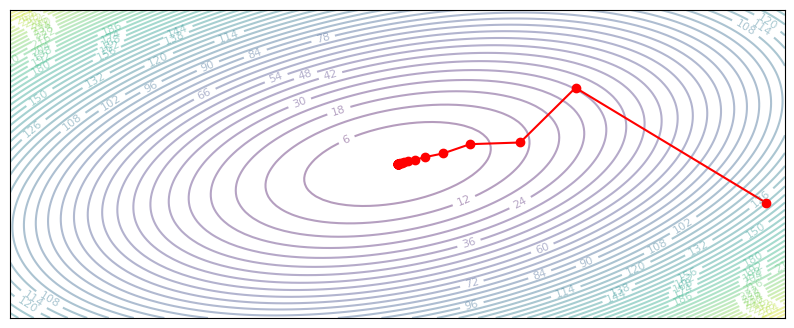
def gradient_descent_diverge(z, grad_z):
return z - 0.34 * grad_z
plot_optim(gradient_descent_diverge)
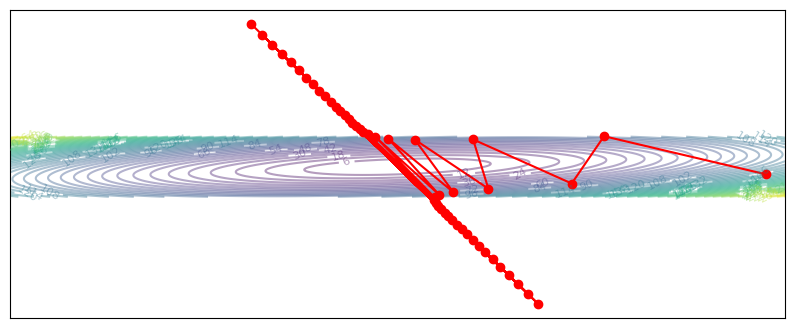
A high learning rate means we will overshoot our optimal parameters. In some cases, the parameters will oscillate between directions but eventually converge (at a slower rate). However, if the update overshoots by too much, the parameters will completely diverge and approach infinity. Both of these are not great.
Learning rate in terms of eigenvalues#
For our simple quadratic loss function, we can actually identify the exact optimal learning rate. Let’s start by examining our cost matrix Q. We’ve defined Q to be a 2x2 matrix, with eigenvalues 1 and 6.
We can rewrite \(Q\) as \(R \Lambda R^T\), where \(R\) contains the two eigenvectors of \(Q\).
theta = np.pi / 16
eigenvalues = np.array([1, 6])
R = np.array([[np.cos(theta), -np.sin(theta)], [np.sin(theta), np.cos(theta)]])
Q = R @ np.diag(eigenvalues) @ R.T
eigenvalues, eigenvectors = np.linalg.eig(Q)
print('Q:', Q)
print('Eigenvalues:', eigenvalues)
print('Eigenvectors (R):', eigenvectors)
Q: [[ 1.19030117 -0.95670858]
[-0.95670858 5.80969883]]
Eigenvalues: [1. 6.]
Eigenvectors (R): [[-0.98078528 0.19509032]
[-0.19509032 -0.98078528]]
This decomposition will give us a clearer look at what gradient descent is doing at each step. We’ll use \(y = R^Tx\) to represent a rotation of \(x\) onto the eigenvector space:
Look at that! When we rotate \(x\) onto the eigenvector space of \(Q\), we get a simple formula – each component of \(y\) decreases exponentially by the rate of \((1 - \alpha \lambda)\). Each component independently decreases, regardless of the status of the other components in the vector. We can view the total loss as the sum of these components, squared and scaled by its equivalent eigenvalue.
ys = []
loss = []
x = np.array([9.5, -1])
for i in range(50):
ys.append(eigenvectors.T @ x)
loss.append(x.T @ Q @ x)
grad_x = Q @ x
x = x - 0.1 * grad_x
# Plot the trajectory
ys = np.array(ys)
plt.figure(figsize=(10, 4))
loss_1 = np.square(ys[:, 0]) * np.abs(eigenvalues[0])
loss_2 = np.square(ys[:, 1]) * np.abs(eigenvalues[1])
plt.plot(loss_1, label='First eigen component')
plt.plot(loss_2, label='Second eigen component')
plt.plot(loss, label='Total Loss')
plt.legend()
plt.show()
def gradient_descent(z, grad_z):
return z - 0.1 * grad_z
plot_optim(gradient_descent)
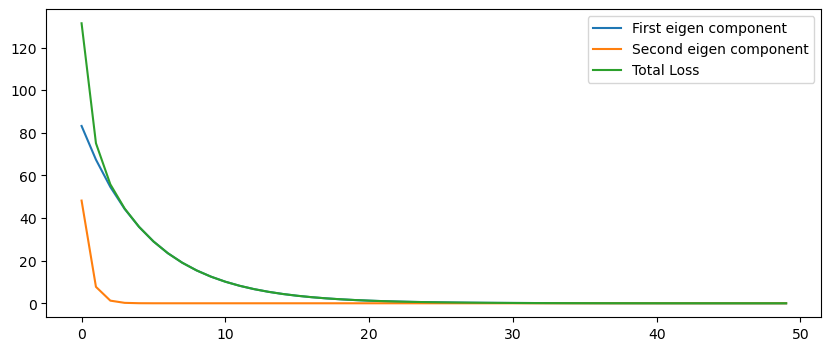
Fig Above: In our quadratic cost function, each eigenvector is an axis of the ellipse. The orange curve represents our point quickly approaching the wide axis, then the blue curve shows our point slowly converging along the short axis.
How can we find the optimal learning rate which will let us converge the fastest? We want to reach \(y=0\) (and therefore \(x=0\)) to minimize loss, so we are bounded by the slowest moving component of \(y\). Remember that each component exponentially decreases by \( |1 - \alpha \lambda|\).
The constraint is therefore as follows. Among all components, we want the slowest rate \(|1 - \alpha \lambda|\) to be the maximum value it can be (so we learn fast), without letting any \( |1 - \alpha \lambda|\) be greater than one (or we will diverge). For our \(Q\) matrix, this means our learning rate should be:
print('Optimal LR is', 2 / (np.max(eigenvalues) + np.min(eigenvalues)))
Optimal LR is 0.2857142857142857
def gradient_descent(z, grad_z):
return z - 0.28 * grad_z
plot_optim(gradient_descent)
Preconditioning#
In the above section, we had to make compromises on our learning rate because we asserted that learning rate was a global scalar. We can generalize the notion of a learning rate to more complicated functions. Preconditioned gradient descent assumes some matrix \(P\) which we’ll use to transform our gradient:
If \(P\) is a diagonal matrix, we can view preconditioning as having a separate learning rate for each coordinate of \(x\). In our quadratic loss, the horizontal dimension is more stretched out, so we could try using a higher learning rate there:
def diagonal_gradient_descent(z, grad_z):
P = np.diag([2, 1])
return z - 0.2 * P @ grad_z
plot_optim(diagonal_gradient_descent)
But really, \(P\) lets us apply any linear transformation to the gradient. For our quadratic case, we actually know the ‘ideal’ transformation to use. Remember that each gradient update has a natural decomposition onto the eigenvector bases of \(Q\). So, we can find a \(P\) which rotates the gradient onto the eigenvalue basis of \(Q\), then apply the maximum learning rate for each eigen component.
Recall that error for each eigen component decreases with a multplier of \(|1 - \alpha \lambda|\), so for the maximum per-coordinate learning rate we want this multiplier to be close to zero, i.e. \(\alpha = 1 / \lambda\).
def preconditioned_gradient_descent(z, grad_z):
P = eigenvectors @ np.diag(1/eigenvalues) @ eigenvectors.T
return z - 1 * P @ grad_z
plot_optim(preconditioned_gradient_descent)
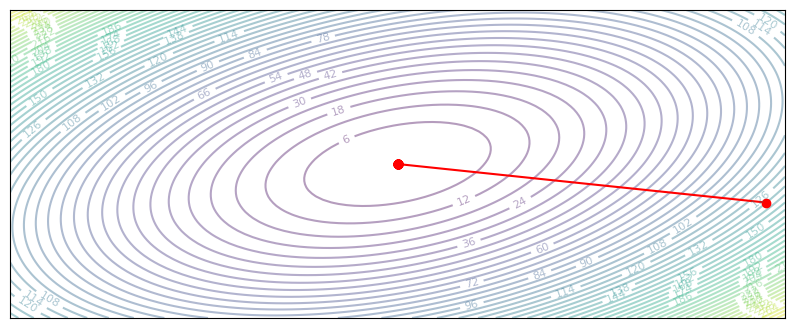
With the analytically ideal preconditioning matrix, we can point directly to the solution, and arrive there in a single gradient step. This one-step solution is a special property of quadratic loss functions, and should not be expected to generalize to more complicated losses. That said, preconditioning is a powerful tool that gives us a more accuate gradient direction. It turns out that preconditioning relates directly to second-order descent methods, which we’ll cover in a page on second-order optimization..
Descent on Neural Networks#
To apply gradient descent to real neural networks, we’ll basically follow the same procedures as above, with two key differences.
The first difference is we won’t have a closed-form equation for our loss function. In machine learning we’ll typically have a large dataset of x, y pairs, and define our loss function to minimize some prediction error over y. This dataset is often so big that it’s unreasonable to try and calculate predictions over the entire dataset at once. Instead, we can sample random pairs from the dataset, and optimize the approximate loss we get from these pairs. This algorithm, known as stochastic gradient descent (SGD), gives us an estimate of the true gradient at each step.
x_batch, y_batch = sample(x, y)
grads = grad(params, x_batch, y_batch)
params = params - grads * lr # Stochastic Gradient Descent
The second difference is that for multi-layer systems, training dynamics for each layer change as the other layers are updated. In the quadratic example above we knew how to find an optimal learning rate, and even an optimal preconditioning matrix. This won’t be true for neural network training. Since each layer depends on the other layers, it’s even more critical to use an iterative procedure.
Let’s try out our simple SGD algorithm on a standard task, MNIST classification. The MNIST dataset is a set of handwritten numerical digits, represented as 28x28 matrices. We’ll collapse each matrix into a 784-length vector, then train a three-layer neural network to classify each digit.
from keras.datasets import mnist
(train_images, train_labels), (valid_images, valid_labels) = mnist.load_data()
print('Dataset size:', train_images.shape)
fig, axs = plt.subplots(1, 10, figsize=(20, 5))
for i, ax in enumerate(axs):
ax.imshow(train_images[i], cmap='gray')
ax.title.set_text(f'Label: {train_labels[i]}')
ax.axis('off')
Dataset size: (60000, 28, 28)

class Classifier(nn.Module):
features: int = 512
num_classes: int = 10
@nn.compact
def __call__(self, x):
x = nn.Dense(self.features)(x)
x = nn.relu(x)
x = nn.Dense(self.features)(x)
x = nn.relu(x)
x = nn.Dense(self.num_classes)(x)
return x
def sample_batch(key, batchsize, images, labels):
idx = jax.random.randint(key, (batchsize,), 0, images.shape[0])
return jnp.reshape(images[idx], (batchsize, -1)), labels[idx]
def learn_mnist(update_fn, init_opt_state):
train_losses, valid_losses = [], []
classifier = Classifier()
key = jax.random.PRNGKey(0)
key, param_key = jax.random.split(key)
images, labels = sample_batch(param_key, 256, train_images, train_labels)
v_images, v_labels = sample_batch(jax.random.PRNGKey(1), 1024, valid_images, valid_labels)
params = classifier.init(param_key, images)['params']
opt_state = init_opt_state(params)
loss_fn = jax.jit(lambda p, x, y: jnp.mean(nn.log_softmax(classifier.apply({'params': p}, x)) * -jnp.eye(10)[y]))
grad_fn = jax.jit(jax.value_and_grad(loss_fn))
for i in range(1000):
key, data_key = jax.random.split(key)
images, labels = sample_batch(data_key, 256, train_images, train_labels)
loss, grads = grad_fn(params, images, labels)
params, opt_state = update_fn(params, grads, opt_state, i)
train_losses.append(loss)
valid_losses.append(loss_fn(params, v_images, v_labels))
# if i % 100 == 0:
# print(f'Iteration {i}, Train Loss: {train_losses[-1]}, Valid Loss: {valid_losses[-1]}')
fig, axs = plt.subplots(1, figsize=(4, 2))
axs.plot(train_losses, label='Train Loss')
axs.plot(valid_losses, label='Valid Loss')
axs.legend()
plt.show()
print('Loss is below 0.15 at iteration', np.min(np.where(np.array(valid_losses) < 0.15)))
def sgd(params, grads, opt_state, step):
return jax.tree_map(lambda p, g: p - 0.001 * g, params, grads), None
init_opt_state = lambda p: None
learn_mnist(sgd, init_opt_state)
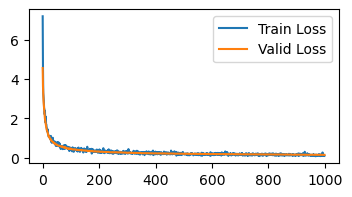
Loss is below 0.15 at iteration 828
Adaptive Learning Rate (Adagrad)#
In the quadratic example, we saw how we can get faster convergence by using different learning rates per coordinate. Adagrad gives us a method of doing the same for deep neural networks. Adagrad can be seen as a preconditioned gradient descent method, where \(P\) is a diagonal matrix. In other words, we will use an independent learning rate for each parameter in our network.
Recall the core issue – some parameters affect the loss more than others. We want to normalize for this. Adagrad achieves this by keeping track of per-parameter gradient variance. When taking each gradient step, we will divide the gradient elementwise by these historical (square root) variances.
@jax.jit
def adagrad(params, grads, variances, step):
scaled_grads = jax.tree_map(lambda g, v: g / (jnp.sqrt(v + 1e-3)), grads, variances)
new_params = jax.tree_map(lambda p, g: p - 0.001 * g, params, scaled_grads)
new_variances = jax.tree_map(lambda v, g: v + g ** 2, variances, grads)
return new_params, new_variances
init_variances = lambda p: jax.tree_map(lambda x: jnp.zeros_like(x), p)
learn_mnist(adagrad, init_variances)
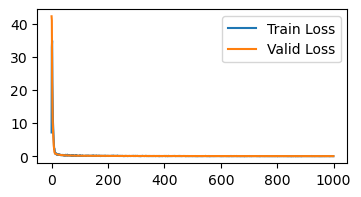
Loss is below 0.15 at iteration 171
Momentum#
Variance in our gradient direction can come from two main sources. First, the nature of stochastic gradient descent means we sample a new batch every update, which can be seen as adding noise to our gradient. Second, updates that are too large can result in oscillations in gradient direction.
To reduce these variances, we can condition our update not just on the current batch, but also on past gradients, which we call momentum. This technique is also known as the heavy ball method, as it resembles our parameters having mass that maintains past directions.
A simple way to implement momentum is to keep track of an exponential moving average of the gradient by introducing a new momentum state \(m\):
@jax.jit
def momentum_update(params, grads, momentum, step):
new_momentum = jax.tree_map(lambda m, g: 0.9 * m + g, momentum, grads)
new_params = jax.tree_map(lambda p, g: p - 0.001 * g, params, new_momentum)
return new_params, new_momentum
init_momentum = lambda m: jax.tree_map(lambda x: jnp.zeros_like(x), m)
learn_mnist(momentum_update, init_momentum)
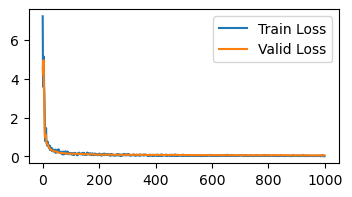
Loss is below 0.15 at iteration 83
Adam#
The most frequently used optimizer today is Adam, which combines insights from adaptive learning rates and momentum. Adam uses an exponential moving average to keep track of both past gradients (i.e. momentum) and past gradient variances (as we did in Adagrad):
Notice that the equations are slightly different then in Adagrad or momentum. The point of these changes is to keep the scales of the momentum and variance estimates consistent. Adagrad has a practical problem—the sum of historical variances will just keep increasing to no limit. Our simple momentum implementation is also weird, as the momentum magnitude will converge to approximately \(1/(1-\beta)\) times the average gradient magnitude. Instead, the Adam equations keep these magnitudes normalized.
Because we initialize \(m\) and \(s\) to zero, at the beginning of training our estimates are closer to zero than we would like. Thus, in Adam we account for this and scale \(m\) and \(s\) by a scalar depending on training step:
where \(\beta^t\) represents \(\beta\) to the power \(t\).
@jax.jit
def adam_update(params, grads, opt_state, step):
momentum, variance = opt_state
b1, b2 = 0.9, 0.999
new_momentum = jax.tree_map(lambda m, g: b1 * m + (1-b1) * g, momentum, grads)
new_variance = jax.tree_map(lambda v, g: b2 * v + (1-b2) * g ** 2, variance, grads)
m_hat = jax.tree_map(lambda m: m / (1 - b1 ** (step + 1)), new_momentum)
v_hat = jax.tree_map(lambda v: v / (1 - b2 ** (step + 1)), new_variance)
update = jax.tree_map(lambda m, v: m / (jnp.sqrt(v) + 1e-6), m_hat, v_hat)
new_params = jax.tree_map(lambda p, u: p - 0.001 * u, params, update)
return new_params, (new_momentum, new_variance)
init_opt_state = lambda m: (jax.tree_map(lambda x: jnp.zeros_like(x), m), jax.tree_map(lambda x: jnp.zeros_like(x), m))
learn_mnist(adam_update, init_opt_state)
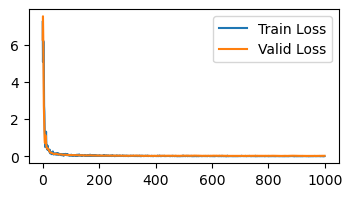
Loss is below 0.15 at iteration 36
Summary of optimization results#
Iteration where loss goes below 0.15:
SGD: 825
Adagrad: 171
Momentum: 83
Adam: 36
So, there’s a reason why Adam is the most popular algorithm today. It’s reliable, converges fast, and does not require much hyperparamter tuning. The main downside to Adam is it requires storing 3x the parameter count (parameters, momentum, variance) which can consume more memory.
For more on optimization, check out the page on second order optimization methods.
References#
Why Momentum Works (https://distill.pub/2017/momentum/)